Virkelighetsnær VR
FREDAGSTECH: Spennende smånyheter som du kanskje har gått glipp av denne uken: Superskarpe VR-biller på markedet, drone lander drone, robotsyn med radio.
Mange av dere er på vinterferie nå, mens andre av oss tyvstartet og tok den forrige uke. Så vi er tilbake fra tur, og har funnet fram noen interessante ting fra teknologiens verden som vi håper kan underholde når skituren er over og peiskosen er i gang!
Virkelighetsnær VR
Den vanlige innvendingen mot de fleste brillene for virtuell virkelighet, VR – Virtual Reality – er gjengivelsen til skjermene i brillene. De er plassert svært nær øynene, med linser foran, noe som gjør at de fleste produktene sliter med at den enkelte pikselen i bildet synes. Det gjør også mellomrommene mellom pikslene, den såkalte «screen door effect». Mange skjermer er rett og slett ikke bygd for å sees på så nære.

Et annet problem når pikslene kommer så nær øyet er at oppløsningen blir så dårlig at skrå linjer blir hakkete og små detaljer lar seg rett og slett ikke gjengi.
Dette har det finske oppstartsselskapet Varjo bestemt seg for å gjøre noe med, og nylig lanserte de sine første VR-briller. Varjo VR-1 inneholder det selskapet kaller et «bionisk display», som fullstendig skal eliminere oppløsningsproblemet i VR-briller.
Dette gjør de riktig nok ikke i hele synsfeltet, som i parantes bemerket ikke er fryktelig imponerende – 87 grader er det selskapet oppgir, noe som er langt smalere enn de 110 gradene som HTC og Oculus har på sine toppmodeller.
Til gjengjeld er bildet helt klart og skarpt rett foran øyet. Varjo har kombinert to skjermer per øye, der skjermen i midten holder en oppløsning på 1920 x 1080, med en pikseltetthet på hele 3000 tusen per tomme. Det er ti ganger flere piksler per tomme enn det en laserskriver eller et magasin på blankt papir opererer med.
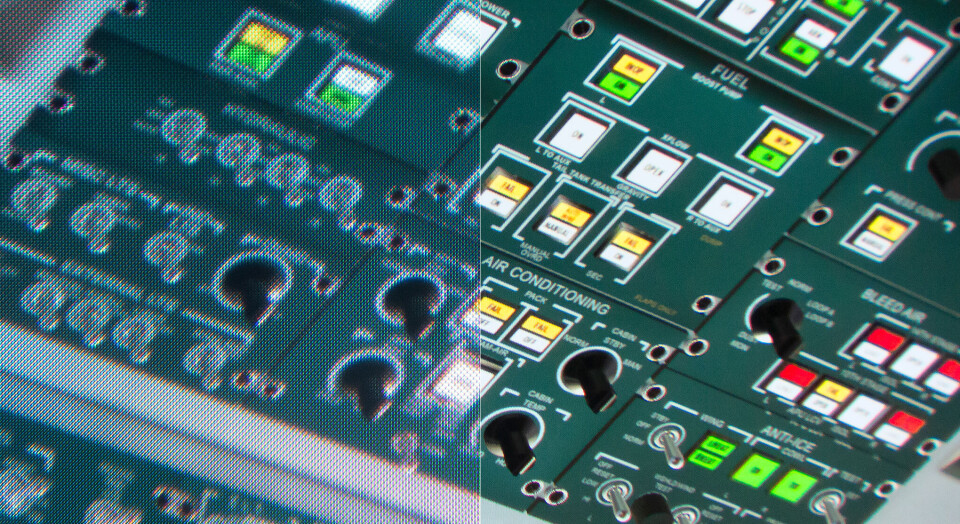
Rundt denne skjermen er det en mer ordinær skjerm på 1440 x 1600 piksler, som tar seg av å vise resten av bildet for perifersynet vårt. Ifølge de som har testet disse brillene er oppløsningen i sentrum av bildet så god at tekst på knapper og instrumenter i en flysimulator fullt leselig, noe som slett ikke lar seg gjøre med andre VR-briller på markedet.
VR-1 har også øyeskanning, som registrerer hvor brukeren ser. Det kan brukes som en slags musemarkør som følger brukerens blikk for å gi interaksjon med elementer i bildet. Sjekk denne videoen, som viser hvordan dette kan fungere for en flygeleder på jobb i tårnet:
Varjo VR-1 viser neste steg i utviklingen av VR-briller. Dessverre viser ikke selskapet noen interesse for privatmarkedet med dette utstyret, det fremkommer tydelig av prislappen. Varjo skal ha solide 5.995 amerikanske dollar for brillene, og oppå dette kommer en obligatorisk årlig serviceavtale på 995 dollar per år.
Ingenting for Hvermannsen, der altså.
Droner lander drone
Når vi hører ordet «drone», så er en firkantet sak med en propell i hvert hjørne det som dukker opp i hodet. Den litt mer presise navngivelsen på denne typen flymaskin er et «quadkopter», altså et helikopter med fire rotorer. Men det finnes mange andre typer droner også.

Droner som skal fly fort, langt eller bære tyngre enn en vanlig drone, har imidlertid faste vinger, slik at de ofte ligner på et vanlig modellfly, selv om de ofte er større – den på bildet over har et vingespenn på godt og vel tre meter. Mesteparten av dronene som brukes profesjonelt til overvåking, kartlegging, inspeksjon, leting og andre oppdrag til havs er selvstyrte og har faste vinger, kan vi lese på Gemini.no, nyhetstjenesten til NTNU og Sintef.
Problemet med droner med fast vinge er at de trenger en flystripe for å lande, og det er det slett ikke alle skip og oljeplattformer som kan tilby. Å få dem opp er enklere, der finnes det løsninger som bruker katapulter, og de tar ikke all verden med plass.
Derfor har forskere ved NTNU funnet på en ny måte å lande droner med fast vinge uten å ha en landingsstripe til rådighet. Deres løsning bruker to andre droner til å fange inn fastvingedronen, og dette er quadkoptre som kan lande vertikalt med «fangsten» mellom seg. Quadkoptrene har en line spent mellom seg, som fastvingedronen kobler seg på ved å fly over linen med sin egen line med en krok på enden.
Video av Mads Bornebusch, NTNU
Dette skjer helt autonomt av alle tre dronene, og om første forsøk på å fange linen mislykkes, er fastvingedronen programmert til å fly rundt og gjøre et nytt forsøk. Quadkoptrene er programmert til å fly i samme retning som fastvingedronen når den nærmer seg, slik at rykket av linen skal bli minst mulig. Deretter flyr quadkoptrene autonomt hjem til skipet sitt, og lander mykt på dekk med fastvingedronen mellom seg – helt uten menneskelig fjernstyring.
Robotsyn med RFID
Å få en datamaskin eller en robot til å se og gjenkjenne ting er ikke enkelt. Det er selvfølgelig en smal sak å utstyre den med et kamera, men det er ikke det samme som syn. For å kunne kjenne igjen gjenstander i kamerabildet kreves det mye og omhyggelig programmering, og det gjør ikke saken enklere om roboten skal kunne forholde seg til objekter som er i bevegelse. Men nå viser det seg at det ikke er sikkert at det er syn som er den beste løsningen for slike situasjoner.

Forskere ved Massachusetts Institute of Technology (MIT) har nå vist en løsning der roboter peiler seg inn på det de skal håndtere ved hjelp av radiobølger i stedet for kamerabilder. De har brukt stokk dumme RFID-etiketter på tingen roboten skal finne, og ved hjelp av RFID-lesere på robotarmen lokaliserer roboten tingen ved hjelp av flere raske radiopeilinger der forskjellene viser hvor tingen er akkurat nå og hvordan den beveger seg.
Dette går imponerende kjapt og presist, forskerne har demonstrert at roboten lokaliserer etiketten på i gjennomsnitt 7,5 millisekunder med en presisjon på mindre enn en centimeter. Dette er altså godt nok i massevis for roboter som jobber ved samlebånd for å utføre pakking eller montasje.
Som et eksempel på hva denne løsningen klarer å gjøre, festet MIT-forskerne en RFID-etikett på en kork, og en annen på en flaske. Deretter tok en robotarm og plukket opp korken mens en annen robotarm plukket opp flasken, og så satte de korken på flasken. Dette hadde krevd mye innsats for å få et kamerabasert system til å løse like bra.
Dette er et godt eksempel på at datamaskiner og roboter kan løse oppgaver på helt andre måter enn det vi mennesker gjør. Det er lett å tro at vår menneskelige metode er den eneste løsningen på et problem, mens en helt ny tilnærming basert på datamaskinenes premisser ofte vil løse samme oppgave på en bedre og enklere måte for roboten.
Kunsten er bare å finne løsningen, når vi studerer problemet fra vårt menneskelige ståsted.






















